
A japán kormány 2025-ben tervezi vízre bocsátani az első önvezető hajókat. Az önnavigáció az önvezetés vízi megfelelője: olyan technológiai fejlesztéseket igényel, amelyek eltérnek a vezető nélküli autók működésének támogatásához szükséges mechanizmusoktól. Cikkünkben ismertetjük a jelenleg fejlesztés alatt álló önnavigációs technológiákkal kapcsolatos legfrissebb híreket.
A hajók önvezető technológiáinak kereskedelmi célú használata várhatóan 2025-ben kezdődik
A gépkocsigyártási ágazatban tovább folyik az önvezető technológiák fejlesztése. Különösen a haszongépjárművek szegmensében nagy a várakozás az ilyen technológiák iránt, ahol a súlyos sofőrhiány, a közúti balesetek és az elnéptelenedő területek ellátása jelentette problémákra várnak tőlük megoldást. A gyakorlatban a vezetéssegítő technológiák, pl. az automatikus fékezés alkalmazása már hamarosan kötelezővé válik a nagyméretű kamionoknál a közúti balesetek által okozott komoly károk miatt.
Az automatizációs technológiák fejlesztése azonban nem csak a gépkocsik piacán, hanem a közlekedés más területein, például a hajóknál is folyamatban van. A japán kormány már dolgozik a távolról vezethető és önállóan működő önnavigáló hajók kereskedelmi bevezetésén. A japán kormány által 2017 júniusában jóváhagyott beruházási stratégia szerint 2025-ben várható a tengeri logisztika fejlesztését célzó önnavigáló hajók kereskedelmi bevezetése.
Az önnavigáló hajókkal kapcsolatban jelenleg zajlanak a kutatások a műholdas kommunikáció, az IoT és az MI alkalmazása terén, hogy miként lehetne ezek segítségével elkerülni más hajókkal és akadályokkal való ütközést. Az önnavigáló hajók kereskedelmi üzemeltetése céljából fejlett K+F tevékenységet végző többi vállalathoz hasonlóan a Fujitsu is dolgozik a vízi járművek automatikus működését támogató megoldásokon. A következő oldalakon a Fujitsu három technológiáját ismertetjük részletesebben: a hajók ütközését megakadályozó, a kikötői szolgáltatások hatékonyságát javító, és a jelenleg humán munkaerő által végzett 7x24 órás térfigyelést automatizáló megoldásokat.
Az emberi gondolkodás és ítélőképesség hibái által okozott ütközések elkerülése: tengeri forgalomirányítás
Amikor a tenger zsúfolva van hajókkal, csökken köztük a távolság, és nő a balesetek valószínűsége. A világon 1642 súlyos tengeri baleset történik évente. Ezek közül 358 jár hajók ütközésével (a japán föld-, infrastruktúra-, közlekedésügyi és idegenforgalmi minisztérium 2014-es felmérése alapján). A felmérés eredményei szerint Japánban elsősorban az emberi gondolkodás és ítélőképesség hibái (információ félreolvasása, helytelen feltételezés, előrejelzési hibák) okozzák a hajók ütközését.
A Fujitsu tengeri közlekedésirányítási megoldása az infokommunikációs technológia segítségével kezeli ezt a problémát. MI és Big Data elemzések segítségével, kétféle problémamegoldó szemlélet szerint meghatározza a közvetlenül az ütközés előtt végrehajtandó intézkedéseket. Egyrészt támogatja az ütközés előtti intézkedéseket megelőző feladatokat, másrészt pedig megkísérli szükségtelenné tenni az intézkedések végrehajtását.
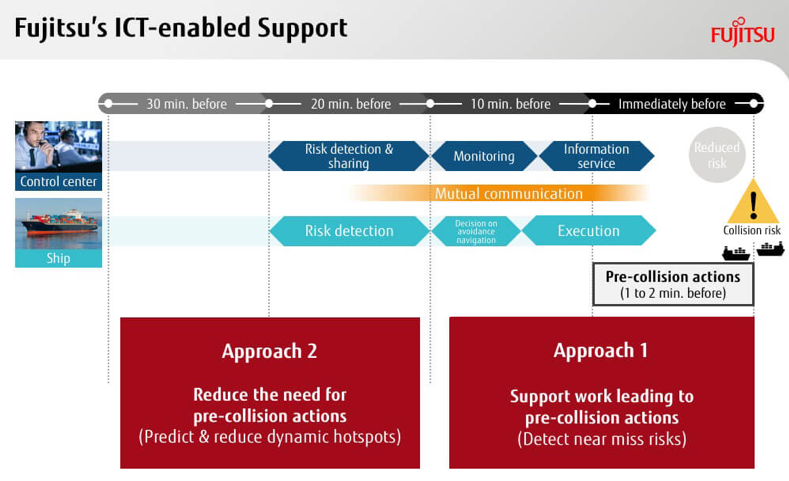
'1. ábra: A Fujitsu két szemlélete
A súlyos veszélyhelyzetek kockázatának észlelése az ütközés előtti intézkedésekhez vezető feladatok támogatására
Az első szemlélet lényege a súlyos veszélyhelyzetek kockázatának észlelése az ütközés előtti intézkedésekhez vezető feladatok támogatása érdekében. A közeli jövőben bekövetkező ütközés veszélyének felismeréséhez emberi tapasztalatra és tudásra van szükség. Ennél a szemléletnél a kockázatok számszerűsítésével segítik a veszély észlelését.
A vízi közlekedés hagyományos rendje szerint az ütközés veszélyére riasztás figyelmeztet. Egyes esetekben azonban a túl gyakori riasztások miatt ez nem segíti a legénység döntéshozását. A probléma kezelése érdekében kockázati motort fejlesztettünk ki. Ez a motor a kockázatokat pontos pályaelőrejelzés segítségével kiszámítva segíti az emberi döntéshozást. Így csökken a felesleges riasztások száma, és kisebb a kockázata annak, hogy egy tényleges veszélyhelyzetet figyelmen kívül hagynak.
Az előrejelzés és a dinamikus hotspotok számának csökkentése enyhíti az ütközés előtti intézkedések iránit igényt
A másik szemlélet az ütközés előtti intézkedések iránti igényt enyhíti. Ez a megoldás egy olyan mechanizmus kidolgozását szorgalmazza, amely előre jelzi és megelőzi a dinamikus hotspotok (azaz a több hajó jelenléte miatt nagy ütközési kockázatú helyek) kialakulását.
A dinamikus hotspotok helye idővel változik, és ez láncreakciót indíthat el az ütközés elkerülésére törekvő hajók között. Az egyes hajók által hozott döntések vagy a hajók közötti kommunikáció önmagában nem szüntetik meg a dinamikus hotspotokat. Ezért fontos előrejelezni vagy megakadályozni a dinamikus hotspotok létrejöttét.
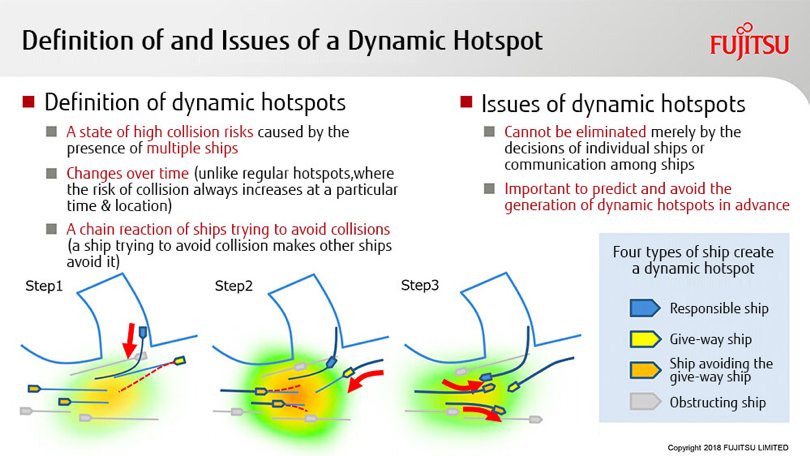
2. ábra: Dinamikus hotspotok: definíció és problémák
A dinamikus hotspotok kialakulásának előre jelzéséhez a megoldás lehívja az egyes hajók pályamintáit, és a hajók típusait az automatikus azonosító rendszer (AIS) adatai közül. A kinyert mintákat tudásbázisba táplálja, és felhasználja a rövid távú haladási pálya és a hosszú távú forgalmi viszonyok előre jelzéséhez. E tudásbázis és az MI-alapú előrejelzés ötvözésével lehet pontosan előre jelezni a haladási pályát és a forgalmat.
A Fujitsu jelenleg Szingapúrban teszteli tengeri forgalomirányítási megoldását. Szingapúrban található a világ legforgalmasabb kikötőinek egyike. A tengeri szállítmányozási iparág az ország GDP-jének 7%-át teszi ki. Szingapúr egyben az ASEAN-régió csomóponti kikötője.
A tesztben hajóforgalom-irányítási technológiákat alkalmazó, fejlett megoldást vezettünk be a szingapúri kikötőben a biztonság fenntartása és a hatékony forgalomirányítás érdekében.
Intelligens kikötőüzemeltetés a kikötői szolgáltatások optimalizálásának szolgálatában
A Fujitsu emellett intelligens kikötőüzemeltető megoldást is fejleszt ömlesztett áruk rakodására szolgáló terminálok számára. Ezek valójában azok a kikötők, ahova az ömlesztett árut szállító hajók érkeznek. A Fujitsu ezt a megoldást is teszteli Szingapúrban annak kiderítésére, milyen javulás érhető el a gyakorlatban kikötői szolgáltatások hatékonyságában és produktivitásában.
A szingapúri kikötőben a hajóknak néha több napot is várakozniuk kell a vízen, mielőtt dokkolnának. A várakozási helyen, a kikötő bejáratánál és kijáratánál kialakuló torlódások szűk keresztmetszetet jelentenek a kikötői szolgáltatások szempontjából, amelyek megnövelhetik a költségeket és lehetőségek elmulasztásával járhatnak.
A Fujitsu két megoldás fejlesztésén dolgozik a várakozási helyen és a kapuknál kialakuló torlódások kezelésére: az intelligens kikötéstervező és a kapuműködés-optimalizáló megoldáson. Ezek a megoldások különösen hasznosak a sokféle bizonytalansággal küzdő kikötőkben (például ahol gyakran késedelmet szenved a hajók érkezése és a kirakodása különféle tényezők, köztük az időjárás miatt).
A várakozási helyen/kapunál jelentkező torlódás minimumra szorítása
Az intelligens kikötéstervező megoldás MI-technológia (adaptív tanulás) segítségével előrejelzés, milyen hosszú ideig maradnak a hajók a kikötőben. Az előrejelzés eredménye alapján lefoglalja a legmegfelelőbb kikötőhelyet, és elkészíti a kikötőbe való belépés tervét. Így kevesebb hajónak kell a vízen vesztegelnie a kikötőhelyek felszabadulására várva.
A kapuműködés-optimalizáló megoldás döntéshozatali eszközként segít optimalizálni azoknak a kapuknak az üzemeltetését, ahol az áruszállító kamionok áthaladnak. Így a rendszer nagyobb tranzakcióvolument tud kezelni, és megoldhatóvá válnak a korlátozott alapterület és az idősödő munkaerő okozta problémák.
A szingapúri tesztek eredményeit más tranzakcióvolumen-növekedésre számító kikötőkben, például a feltörekvő országok kikötőiben is hasznosítani fogjuk.
MI-alapú automatizált térfigyelés az ütközések elkerülésére
Az önnavigáció támogatásának egyik módja a térfigyelés automatizálása. Az emberi munkaerő által 7x24 órában biztosított, hagyományos őrszolgálat komoly munkaterheléssel jár a legénység tajgai számára.
A Fujitsu megoldást fejleszt a terhelés enyhítésére. Rendszerünk a hajó elejére szerelt kamera segítségével monitorozza haladási pályát, és szükség esetén riasztásokat indít el. A megoldás lelke egy MI-technológiát (mélytanulást) alkalmazó képfelismerő rendszer.
A többi hajót automatikusan azonosító képfelismerő rendszer fejlesztése
A képfelismerő rendszer figyeli az azonos pályán haladó többi hajót és a lebegő objektumokat (pl. jelzéseket, bójákat és rögzített halászhálókat). A térfigyelésből nyert képeket azután mesterséges intelligencia elemzi a hajók azonosítása érdekében. Az egyéb objektumokat a rendszer akadályként azonosítja. A hajókat a megoldás egyelőre a következő kategóriákba sorolja: gépkocsiszállító, ömlesztettáru-szállító, tartályhajó, konténerhajó és egyéb kisméretű hajó. A hajóállomány azonban jelentősen eltér a sok horgonyzó hajót befogadó kikötő és a nyílt óceán között. Annak eldöntése, hogy pontosan hányféle és milyen hajókategóriákra van szükség a működéshez, a jövő feladata.
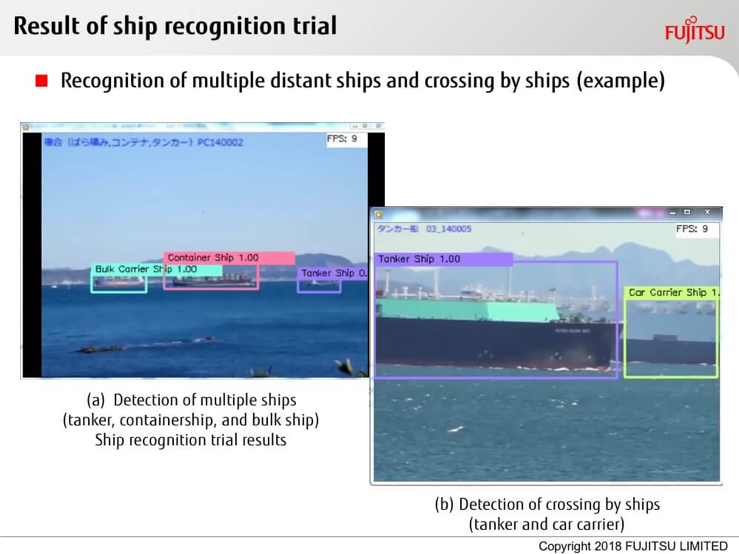
3. ábra: Hajófelismerési teszt eredménye
A haladási pálya monitorozásához több problémát is meg kellett oldanunk. Előfordult például, hogy a rendszer egy-egy nagyobb hullámot hajóként észlelt a hagyományos képfeldolgozás során, máskor pedig a radar nem tudta megkülönböztetni egymástól a hullámokat és a kisebb hajókat. Ezenkívül az éjszaka vagy sűrű ködben végzett monitorozáshoz éjjellátó kamera vagy infravörös kamera szükséges a normál optikai kamera helyett.
A kamera által készített képeket MI-vel elemző hajófelismerő teszt során az oktatási adatok felhasználásával kidolgoztunk egy kifejezetten a képkezelést támogató konvolúciós neurális hálózati (CNN) modellt. A teszteredmények értékelése és a hangolás elvégzése után addig tápláltuk be a tanulási adatokat a rendszerbe, amíg a teszteredmények el nem értek egy bizonyos szintet. Fontos tudni, hogy a tanulási adatok úgy működnek a rendszernél, mint a tanár, aki megoldandó feladatokat ad és megoldásokkal szolgál.
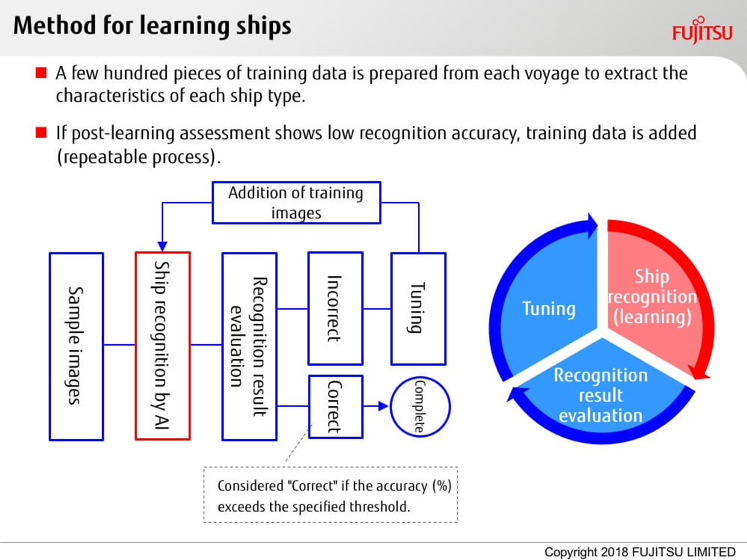
4. ábra: A hajófelismerés tanulásának módszere
E folyamat nyomán a hullámok jellemzőinek számát némileg csökkentettük a tanulási folyamatban, és ezzel megszűnt a hullámok téves észlelése. Ezt az MI tanulási képességeivel értük el.
A 3. ábra példájában a rendszer úgy van beállítva, hogy mutassa meg a legalább 80%-os pontossággal azonosított objektumokat. Bár a háttérben a városi panoráma egyes elemeit a rendszer tévesen hajóként azonosította a tanulási folyamat kezdetén, a későbbi ismételt tanulást követően a rendszer már ki tudta nyerni a hajó jellemzőit, és így pontosabbá vált a hajók felismerése.
Az Uraga-csatornában haladó hajókon végzett rendszerteszt során a rendszer sikeresen felismerte a távolban haladó hajókat, az elhaladó hajók típusát és a láthatáron feltűnő hajókat. A teszt során szabványos videókamerát alkalmaztak, és a rendszer 4-5 kilométer távolságból észlelte az objektumokat. Bebizonyítottuk, hogy az emberi szem által hajóként azonosított objektumokat az MI is képes azonosítani, és azt is, hogy a hajók azonosításához ezen a szinten nincs szükség fejlett specifikációjú kamerára.
A jövőbeni gyakorlati alkalmazás akadályai
A hipotetikus hajózási helyzetekben végzett MI-alapú felismerés eredményeinek értékelése felhívta a figyelmet néhány további fejlesztést igénylő részletre. Például a felismerési arány bizonyos mértékű javulása után a hajók felismeréséhez a hajó elejéről és hátuljáról is képeket kell készíteni a hajókról. A Fujitsu azt tervezi, hogy kamerát telepít egy hajóra kifejezetten azzal a céllal, hogy a többi hajót fotózza, majd a képadatokat importálja. Mivel pusztán az elejük és a hátuljuk jellegzetességei alapján nehezen lehet megkülönböztetni a hajótípusokat, szükség szerint 3DCG modelleket kell kidolgozni a tanításra felhasználható nagyszámú adat létrehozásához.
Az is fontos, hogy az MI kedvezőtlen exponálási viszonyok között (pl. háttérfényben vagy eltérő beesési szögű napsütésben, mondjuk kora reggel vagy kora este) is képes legyen azonosítani a célobjektumokat.
Éjszaka és sűrű ködben ellensúlyozni kell valahogy a rossz látási viszonyokat. A Fujitsu ezt figyelembe véve jelenleg dolgozik egy infravörös kamerát használó rendszer fejlesztésén. Az infravörös kamerával készült képeknél egyelőre azonban alacsony a felismerési arány a rendelkezésre álló tanulási adatok kis volumene miatt. A jövőben szeretnénk növelni ezeknek az adatoknak a mennyiségét és ezen keresztül a pontosságot. Terveink között szerepel a koncepcióellenőrzés (PoC) során kinyert tanulási adatok felhasználása.
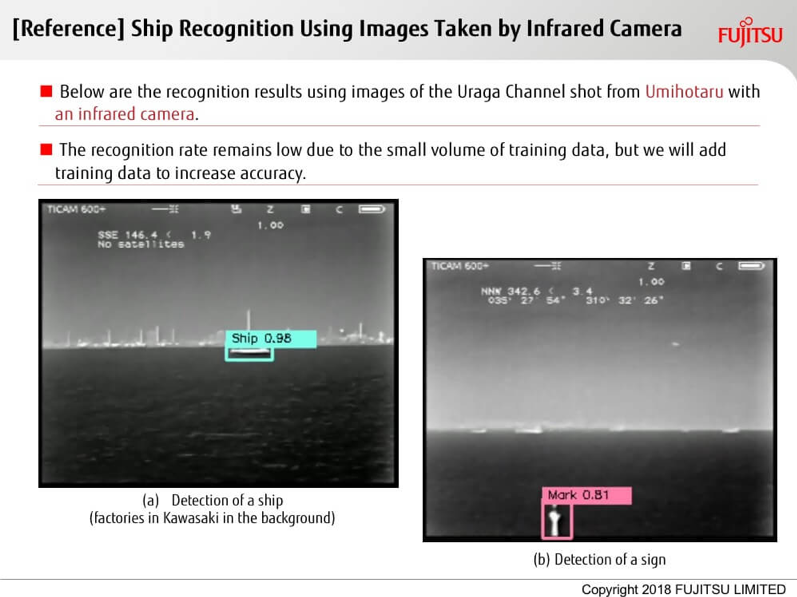
5. ábra: Hajó felismerése infravörös kamerával készített képek alapján
Monitorozó rendszer használata esetén a kameraköltség is problémát jelenthet. Ahhoz, hogy a távolban felismerjünk kisméretű objektumokat, nagy felbontású kamerára van szükség. A fejlett specifikációjú kamera azonban megdrágítja a rendszert, miközben a felhasználó vállalatok szeretnék alacsony szinten tartani az üzemeltetési költséget. Ehhez az is hozzátartozik, hogy az MI-t használó képfelismerő rendszerek költsége alacsony, amíg csak tanulásra és modellezésre használják őket. Így ezt a rendszert széles körben lehet majd alkalmazni, mihelyst megoldódik a kamera problémája.
Az önnavigáció mellett a Fujitsu az intelligens kikötői szolgáltatások támogatására is szeretné felhasználni a mesterséges intelligenciát. A kikötőn belül vagy út közben a hajók egymás közötti távolságának ellenőrzése, az automatikus lehorgonyzás, vagy az önvezető kamionok követésének képessége elősegíti a biztonságos hajózást, és ezen keresztül a kikötő hatékonyabb és produktívabb üzemeltetését.
Folyamatos fejlesztések az önnavigáló hajók 2025-ös bevezetéséig
Az önnavigáló hajók gyakorlati használatához többféle technikai elemet is ki kell dolgozni. Az IKT fejlődése terén meglehetősen lassú ütemben haladó hajózási ágazatban az önnavigáló hajóknak fontos szerep jut majd a csökkenő globális piaci részesedés visszaszerzésében.
Ehhez pedig az innovatív technológiák (MI, IoT és Big Data) eredményes alkalmazására van szükség. A Fujitsu további K+F tevékenységet végez annak érdekében, hogy ezek a technológiák átfogóbb és integráltabb módon szolgálják az ügyfelek sokféle igényét. Megoldásainkkal a vízi közeledés biztonságosabbá tételéhez szeretnénk hozzájárulni.
Fujitsu Magyarország